

Et la photo ? sans preuve .....

Romuald - 1970 - Coupe - Orange 302 Spécial
Started by
Romuald
, Aug 20 2004 05:47 PM
3006 replies to this topic
#2081

le gugusse de Montauban
-

- Membres
-

- 2156 Messages :
Mousquetaire affilié à la ligue des anti cons
- Gender:Male
- Location:Le Béarn et la Bigorre
- Interests:Mes enfants, ma femme, Valentine (ma mumu), la moto, AC/DC, les tontons flingueurs, le Jack et les apéros avec les poteaux
- Mustang:coupé 68 302 4V+C4
Posté 22 November 2012 - 07:39 PM
![]()
#2082
cyril
-

- Membres
-
- 2797 Messages :
Top Fuel
- Gender:Male
- Location:toulouse 31
- Interests:balades avec ma petite famille,mon sportsroof,et le jack-daniel.....
- Mustang:mach1 code M de 70, 351 4V inside
Posté 22 November 2012 - 09:19 PM
ben ouias on veux voir le résultat nous !
Ce message a été modifié par cyril - 22 November 2012 - 09:20 PM.
"LA SCIURE" toujours un jack d'avance...
boite 5 by GForce...
#2083
cyril
-
- Membres
-
- 2797 Messages :
Top Fuel
- Gender:Male
- Location:toulouse 31
- Interests:balades avec ma petite famille,mon sportsroof,et le jack-daniel.....
- Mustang:mach1 code M de 70, 351 4V inside
Posté 22 November 2012 - 09:22 PM
c'est quoi ce nouveau foruuuummmm qui écrit de façon fantaisiste ?
on peut même pas corriger quant on a des gros doigts comme mooiu ijoaizd,zudnia
on peut même pas corriger quant on a des gros doigts comme mooiu ijoaizd,zudnia
"LA SCIURE" toujours un jack d'avance...
boite 5 by GForce...
#2084
le gugusse de Montauban
-
- Membres
-
- 2156 Messages :
Mousquetaire affilié à la ligue des anti cons
- Gender:Male
- Location:Le Béarn et la Bigorre
- Interests:Mes enfants, ma femme, Valentine (ma mumu), la moto, AC/DC, les tontons flingueurs, le Jack et les apéros avec les poteaux
- Mustang:coupé 68 302 4V+C4
Posté 22 November 2012 - 10:07 PM
Tiens c'est vrai j'avais pô r'maarquééééé !! pe plu ko riz j'ai !!!
![]()
#2085
cyril
-
- Membres
-
- 2797 Messages :
Top Fuel
- Gender:Male
- Location:toulouse 31
- Interests:balades avec ma petite famille,mon sportsroof,et le jack-daniel.....
- Mustang:mach1 code M de 70, 351 4V inside
Posté 22 November 2012 - 10:18 PM
ou alors c'est le jack !Tiens c'est vrai j'avais pô r'maarquééééé !! pe plu ko riz j'ai !!!
"LA SCIURE" toujours un jack d'avance...
boite 5 by GForce...
#2086
Romuald
-
- Root Admin
-
- 11776 Messages :
Top Fuel
- Gender:Male
- Location:Burgundy France
- Interests:Néant
- Mustang:Orange 302 Spécial 1970
Posté 23 November 2012 - 04:54 PM
essayez de taper avec les doigts sur le clavier . Parrait que ca va mieu qu'avec les pieds 

It's not a Clevor. it's a RRP Windland build in Burgundy
#2087
le gugusse de Montauban
-
- Membres
-
- 2156 Messages :
Mousquetaire affilié à la ligue des anti cons
- Gender:Male
- Location:Le Béarn et la Bigorre
- Interests:Mes enfants, ma femme, Valentine (ma mumu), la moto, AC/DC, les tontons flingueurs, le Jack et les apéros avec les poteaux
- Mustang:coupé 68 302 4V+C4
Posté 23 November 2012 - 05:11 PM
Va faire tes patés de sable toi !!
![]()
#2088
Jack Daniels 64
-

- Membres
-
- 1843 Messages :
Top Fuel
- Location:GAN (64)
- Interests:La bonne bouffe, 1 Jack Daniels, les sports mécaniques, 1 Jack Daniels, l'amour avec ma femme, 1 Jack Daniels, membre club custom, 1 Jack Daniels, membre club 4x4, 1 Jack Daniels, mes potes bikers et 1 seau de Jack Daniels
- Mustang:Mach 1 de 1972, équipée du Bigblock 429
Posté 23 November 2012 - 05:41 PM
Va faire tes patés de sable toi !!
+1......... y en a qui attendent pour inaugurer l'installation..... à défaut d'y pendre la crémaillère on suspendra un vilo ou un aac....

Un Jack Daniels, une Mustang = 2 bonnes raisons d'aimer la vie
 Member of 71-73 Stanger Group
Member of 71-73 Stanger Group
#2089
Romuald
-
- Root Admin
-
- 11776 Messages :
Top Fuel
- Gender:Male
- Location:Burgundy France
- Interests:Néant
- Mustang:Orange 302 Spécial 1970
Posté 23 November 2012 - 08:10 PM
La photo ? ... ha, j'ai oublié ca ... d'un autre coté, avec une pelle dans une main et une pils dans l'autre; j'ai un peu de mal a jouer au reporter ...Et la photo ? sans preuve .....
Bha t'sais, chez nous on inaugure pendant la construction comme ca on perd pas de temps apres+1......... y en a qui attendent pour inaugurer l'installation.....
It's not a Clevor. it's a RRP Windland build in Burgundy
#2090
cyril
-
- Membres
-
- 2797 Messages :
Top Fuel
- Gender:Male
- Location:toulouse 31
- Interests:balades avec ma petite famille,mon sportsroof,et le jack-daniel.....
- Mustang:mach1 code M de 70, 351 4V inside
Posté 23 November 2012 - 09:55 PM
dommage pour cette photo, j'aurais pu la rajouter dans mes archives hé hé !!!
"LA SCIURE" toujours un jack d'avance...
boite 5 by GForce...
#2091
cyril
-
- Membres
-
- 2797 Messages :
Top Fuel
- Gender:Male
- Location:toulouse 31
- Interests:balades avec ma petite famille,mon sportsroof,et le jack-daniel.....
- Mustang:mach1 code M de 70, 351 4V inside
Posté 24 November 2012 - 06:28 PM
je savais bien que tu nous cachais des choses !

je te dirais demain si le jeu en vaut la chandelle !

je te dirais demain si le jeu en vaut la chandelle !
"LA SCIURE" toujours un jack d'avance...
boite 5 by GForce...
#2092
le gugusse de Montauban
-
- Membres
-
- 2156 Messages :
Mousquetaire affilié à la ligue des anti cons
- Gender:Male
- Location:Le Béarn et la Bigorre
- Interests:Mes enfants, ma femme, Valentine (ma mumu), la moto, AC/DC, les tontons flingueurs, le Jack et les apéros avec les poteaux
- Mustang:coupé 68 302 4V+C4
Posté 24 November 2012 - 06:38 PM
Comme s'il avait besoin de ça !!
![]()
#2093
Romuald
-
- Root Admin
-
- 11776 Messages :
Top Fuel
- Gender:Male
- Location:Burgundy France
- Interests:Néant
- Mustang:Orange 302 Spécial 1970
Posté 24 November 2012 - 06:42 PM
ouais, quelques raisins son tombé de ma poche un jour ou je passais en italie, donc forcement ...
It's not a Clevor. it's a RRP Windland build in Burgundy
#2094
cyril
-
- Membres
-
- 2797 Messages :
Top Fuel
- Gender:Male
- Location:toulouse 31
- Interests:balades avec ma petite famille,mon sportsroof,et le jack-daniel.....
- Mustang:mach1 code M de 70, 351 4V inside
Posté 25 November 2012 - 03:42 PM
bon ça fait rapidement effet je sais pas ce qu'ils mélange dans ce vin les macaronis, mais ça décoiffe sur le moment !
après un séance de réglage carbu sur la mach 1,l'effet retombe aussi vite qu'il est venu ensuite !
après un séance de réglage carbu sur la mach 1,l'effet retombe aussi vite qu'il est venu ensuite !
"LA SCIURE" toujours un jack d'avance...
boite 5 by GForce...
#2095
Romuald
-
- Root Admin
-
- 11776 Messages :
Top Fuel
- Gender:Male
- Location:Burgundy France
- Interests:Néant
- Mustang:Orange 302 Spécial 1970
Posté 25 November 2012 - 04:22 PM
Ouais, c'est du pinard a pizza quoi ... Perso, dans les vins italien j'aime assez l'Amarone. Le probleme c'est qu'il sont pas foutu de faire du fromage pour aller avec
It's not a Clevor. it's a RRP Windland build in Burgundy
#2096
cyril
-
- Membres
-
- 2797 Messages :
Top Fuel
- Gender:Male
- Location:toulouse 31
- Interests:balades avec ma petite famille,mon sportsroof,et le jack-daniel.....
- Mustang:mach1 code M de 70, 351 4V inside
Posté 25 November 2012 - 04:56 PM
Ouais, c'est du pinard a pizza quoi ... Perso, dans les vins italien j'aime assez l'Amarone. Le probleme c'est qu'il sont pas foutu de faire du fromage pour aller avec
le parmesan est pas trop mal sur un bon rouge quant même....
"LA SCIURE" toujours un jack d'avance...
boite 5 by GForce...
#2097
Romuald
-
- Root Admin
-
- 11776 Messages :
Top Fuel
- Gender:Male
- Location:Burgundy France
- Interests:Néant
- Mustang:Orange 302 Spécial 1970
Posté 09 December 2012 - 06:58 PM
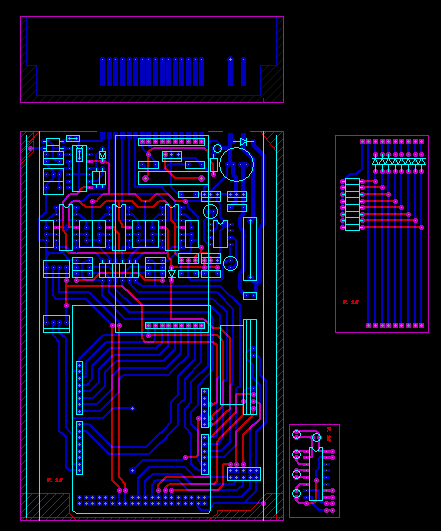
Today, c'etait routage du dernier modele de PerfTracker. j'ai reussi a tout caser sur la platine, mais ca a pas été facile. Bon ca valait la peine de se casser un peu le trognon avec ca, parce que franchement, ce truc, ca va dechirer sa race, meme pas t'imagines ...
...
It's not a Clevor. it's a RRP Windland build in Burgundy
#2098
cyril
-
- Membres
-
- 2797 Messages :
Top Fuel
- Gender:Male
- Location:toulouse 31
- Interests:balades avec ma petite famille,mon sportsroof,et le jack-daniel.....
- Mustang:mach1 code M de 70, 351 4V inside
Posté 09 December 2012 - 07:09 PM
il est bizarre ton nouveau téléviseur !
je crois que tu peux faire marcher la garantie
je crois que tu peux faire marcher la garantie
"LA SCIURE" toujours un jack d'avance...
boite 5 by GForce...
#2099
PiOnPiOn (Cédric)
-

- Membres
-
- 1938 Messages :
Top Fuel
- Gender:Male
- Location:88 vosges, France
- Mustang:Coupé 65
Posté 09 December 2012 - 07:09 PM
héhé, qu'est ce qu'il fait de beau celui là? en tous cas chapeau, tout rentre au chausse pied sur le CI
Cédric // PiOnPiOn![]()
#2100
Romuald
-
- Root Admin
-
- 11776 Messages :
Top Fuel
- Gender:Male
- Location:Burgundy France
- Interests:Néant
- Mustang:Orange 302 Spécial 1970
Posté 11 December 2012 - 02:33 PM
héhé, qu'est ce qu'il fait de beau celui là?
Bhaa comme l'autre, il log ....
Déjà pourquoi un nouveau PerfTracker. Le précèdent modèle avait déjà beaucoup d’atouts, en tous cas, il etait déja bien au-dessus de ce que peut faire un Innovate et avec une meilleur précision donc pourquoi changer ... En premier lieu, il m'en faut un pour mon banc moteur, donc je vais y coller l'ancien modele et la Orange aura droit au nouveau.
Rappel des fonctions et possibilités du PerfTracker 1
8 Entrées Analogiques 10 bits dont une occupée par un convertisseur F/U (capture RPM)
6 Entrées digitales activées par mise à la masse
2 sorties sur relais programmables
10 cycles d’acquisitions /secondes
Horloge temps réel (RTC) avec backup
Système de fichiers FAT32 avec horodatage et stockage > 2Go
Transfert de données temps réel (protocole PerfTracker 1 sur liaison UDP IEEE 802.11 b/g/n)
Affichage paramètres et données sur LCD 2 x16
Clients Windows CE, Windows mobile 5 à 6.5, Windows Xp et ultérieur
Ect …
Tout ça laisse rêveur et ça va bien au-delà de ce que je m’étais fixé dans le cahier des charges initiale. Malgré ça, après quelques années d’utilisation il m’ait arrivé de me dire ‘dommage que ça ne fasse pas ça ou ça …’ C’est donc que le truc est perfectible.
Voilà les ‘reproches’ que je fais a ce modèle 1 :
La gestion des sorties rendent le bazar trop propriétaire. De plus comme mes sorties géraient l’activation du Nos et le Linelock, ça m’obligeais à dataloguer à chaque fois que je voulais utiliser une de ces options.
L’afficheur LCD, c’est bien, mais quand le soleil tape dessus, on ne voit plus grand-chose. Il était parfois difficile pour moi de savoir dans quel mode j’étais et il m’ait arrivé de partir en run sans avoir activé le Nos à cause de ça.
Pas de possibilité de récupérer les fichiers enregistrés sur la SD sans retirer celle-ci. Quand je n’avais que mon mobile et pas d’ordi portable, j’étais obligé de le connecter avec pendant mes runs pour avoir les données. Sans ça, j’étais obligé d’attendre d’être à la maison pour analyser mes logs.
Quel que soit le client, il fallait avoir le programme d’installé et avec les bons paramètres de capteurs. Il m’est arrivé de me mélanger les pinceaux dans mes fichiers de config et forcement les valeurs ne voulaient plus rien dire.
Pas de possibilité de commander le boitier. Les liaisons servaient juste à le configurer et recevoir les données en temps réel. Les données enregistrées et envoyées étaient brutes et avaient besoin d’être ‘décodées’ pour être humainement compréhensibles.
Le nouveau PerfTracker
Suppression de l’afficheur LCD
Passage de 2 à 0 sorties
Passage de 8 à 6 entrées analogiques
Passage de 6 à 8 entrées numériques
Réduction à un maximum de 5 cycles d’acquisitions /seconde.
Régression ? … surement pas. Un afficheur difficile à lire quand on en a besoin, c’est une tare, donc je l’enlève. Les sorties étaient réservées pour la gestion du Nos et du Linelock avec les contraintes citées plus haut, donc contrainte = j’enlève. Je perds 2 entrés analogiques, ça c’est effectivement un moins en revanche je gagne 2 entées numériques. Auparavant, mes cycles d’acquisitions avaient besoin d’être très rapide du fait que j’avais des sorties qui réagissait en fonction des valeurs lues. Inconvénient, une masse de données très importante a traiter et pas forcement nécessaire compte tenu de l’inertie de la plupart des capteurs. Avec l’externalisation de la gestion du Nos, je peux me permettre de réduire de moitié la quantité de données en limitant à 5 cycles par secondes au lieu de 10. Cette limitation m’ouvre aussi d’autres perspectives intéressantes. Le gain de temps entre chaque cycle va me permettre d’augmenter les durées d’acquisitions analogiques et d’intégrer des filtres ‘software’, donc je gagne énormément en précision. Pour avoir bien bucher sur le truc, j’en suis arrivé à la conclusion qu’il valait mieux avoir une quantité d’information suffisantes et précises que trop d’infos inutile et moins précises. Ceci dit avec une lecture par capteur toutes les 0.2 secondes on reste dans le domaine du très performant compte tenu de tout ce que ça fait autour.
Maintenant, les vraies nouveautés.
Déjà, la simplification d’utilisation en embarqué. Quand on tatane, on n’a pas forcement le temps de s’occuper de tout, donc juste un bouton poussoir pour démarrer et stopper l’enregistrement de données. Bien sur un bouton marche/arrêt et un led bicolore (eteint = off, vert = on, rouge= enregistrement en cours). Là où ça devient vraiment une grosse evolution, c’est que le boitier va héberger son propre système de commande (baptisé ‘pOS’ pour PerfTracker Operating System). Des liaisons bidirectionnelles accessiblent aussi bien avec un port série ou USB via n’importe quel terminal mais aussi en Telnet via le Wifi. A aujourd’hui pOS compte déjà près d’une quarantaine de commandes :
version : retourne la version du système
time : retourne la date et l’heure du system
set_time (avec paramètres) met à jour la date et l’heure du system
start : démarre l’acquisition
open : démarre l’enregistrement d’un nouveau fichier
close : arrête l’enregistrement en cours
stop : arrête les processus ‘start,open,red_sensor et red_digit’
get_sensor n : retourne les paramètres et la valeur lue du capteur analogique n° n
set_sensor_name n nomcapteur : initialise le paramètre ‘Nom’ du capteur analogique n° n
set_sensor_valmin n valeur : initialise le paramètre Valeur Minimum du capteur analogique n
set_sensor_valmax n valeur : idem pour le paramètre ‘Valeur Maximum’
set_sensor_datmin n : idem pour le paramètre ‘Data Minimum’
set_sensor_datmax n : idem pour le paramètre ‘Data Maximum’
get_digit n : retourne les paramètres et l’état lu du capteur digitale n° n
set_digit_name n nomcapteur : initialise le paramètre ‘Nom’ du capteur digitale n° n
set_digit_valoff n valeur : idem pour le paramètres ‘Valeur Off’
set_digit_valon n valeur : idem pour le paramètre ‘Valeur On’
get_sensors : retourne la listes, les paramètres et les valeurs lues de tous les capteurs analogiques
get_digits : retourne la liste, les paramètres et les êtas lus de tous les capteurs numériques
read_sensor n : retourne en boucle la valeur lue du capteur analogique n° n
read_digit n : retourne en boucle l’état lu du capteur digitale n° n
save_config : sauvegarde la configuration du system
reset_config : remet tous les paramètres par défaut (config usine)
get_config : télécharge le fichier de configuration
reset : reboot le système
dir : retourne la liste des fichiers enregistrés et l’occupation de la carte mémoire
get_file nomfichier : télécharge le fichier nomfichier
set_file nomfichier : ouvre un fichier sur la carte mémoire
wrt_file : écrit dans le fichier ouvert avec set_file
cls_file : ferme le fichier ouvert avec set_file
kill nomfichier : efface le fichier nomfichier
kill_all : efface tous les fichiers d’acquisition présent sur la carte mémoire
set_delais : ajuste le paramètre de durée d’attente entre chaque cycle de lecture
set_com paramètres : défini les paramètres du port série pour la console puis rebbot
net_on : active la connection wifi
net_off : desacitve la connection wifi
mod_reader : transforme l’appareil en lecteur de carte sd usb
mod_logger : remet l’appareil en configuration datalogger
En ce moment je bosse sur les commandes suivantes :
usb_to nomfichier : transfert le fichier nomfichier sur une clé usb branché sur l’appareil
usb_toall : transfert tous les fichier sur une clé usb
usb_from nomfichier : transfert le fichier nomfichier de la clé usb a la carte mémoire
usb_fromall : transfert tous les fichiers de la clé usb vers la carte mémoire
J’en rajouterais sans doute d’autre quand j’aurais libérer un peu d’espace sur la pile de mon imagination …. Bien sûr, tout ça avec la gestion des cohérences et des erreurs qui vont avec, donc ça fait déjà un beau bout de code.
Le soft embarqué est entièrement développé en C# avec le Micro Framework 4.1 et il en code 100% managé (merci le nouveau contrôleur cadencé à 72 Mhz …)
Bon la ligne commande, c’est bien, mais j’ai déjà bien avancé sur les softs clients riches. Un en C# Silvelight pour Windows et une version Java pour Linux et surtout Android. J’attends d’en savoir plus sur Windows phone 8 pour voir si je me lance sur ce system, mais a aujourd’hui pas convaincu que ça en vaille la peine. Même chose pour l’Iphone, cet appareil ne m’intéresse pas, donc aucun intérêt à m’y attarder.
Coté hardware, il y a un truc qui me tenait à cœur depuis la première version. C’est l’Independence de l’impédance des capteurs analogique et l’isolation galvanique des entrées numériques. Avant, pour les analogiques, j’attaquais direct des convertisseurs ADC qui travaillaient de 0 à 5 volts et j’avais juste placé un filtre anti repliement sur chaque ligne. Avec ce contrôleur, les lignes d’entrées travaillent de 0 à 3.3 volts, il fallait donc que j’interface les lignes avec un diviseur pour chacune d’elles. Soucieux d’avoir un truc le plus précis possible, j’ai maintenant interfacé ces entrées en entrant sur 2 suiveurs en cascade avec un diviseur de tension ajustable intercalé entre les deux, le tout suivi par mon filtrage. La se posait le problème d’offset des aop. Bien que très peu de capteur soient susceptible de descendre sous la tension d’offset, j’ai pris quand même soin d’alimenter mes aop avec une tension négative pour m’affranchir de ça. Pour les entrées digitales, je vais passer par des optocoupleurs NPN. Coté alimentation avant, je faisais Ubat -> 7809 -> 7805. Là, j’optimise Ubat -> LM2940CT-12 -> 7808 -> LM317. Le 2940CT12 est l’équivalent d’un 7812 mais en low dropout. Le 5 volts pour les capteurs analogiques sera ajusté de façon précise avec le LM317 (qui est aussi beaucoup plus stable qu’un 7805). Le 8 volt est nécessaire pour alimenter ma carte processeur, il va aussi permettre de soulager le LM317 en tension d’entrées et il va alimenter le positif de mes aop. Le -8v des Aop sera fourni par un inverseur ICL7660 derrière le 7808. Pour les AOP, j’avais prévu des classiques LM324, mais pour limiter le courant tiré sur le 2940 le 7808 et l’inverseur je vais monter des LF444 (plus cher, mais bien moins gourmand). Le bazar intègre toujours le convertisseur F/U à base de Lm2917-14 pour le régime moteur et un module basé sur un MAX232 pour la liaison série de la console. Il me reste à choisir le module wifi. La dessus j’hésite encore entre garder la possibilité telnet et udp ou alors passer en tout série et utiliser du bluetooth. Je dois encore réfléchir un peu sur ce point.
Voilà Cedric, c’est juste un petit aperçu des évolutions du bazar pour répondre à ta question. Tu m’excuseras de pas trop entrer dans les détails, mais ça ferait beaucoup trop de chose a ecrire

Ce message a été modifié par Romuald - 11 December 2012 - 02:45 PM.
It's not a Clevor. it's a RRP Windland build in Burgundy






3 utilisateur(s) en train de lire ce sujet
0 membre(s), 3 invité(s), 0 utilisateur(s) anonyme(s)

